咨询电话
13924666952
400-158-1606


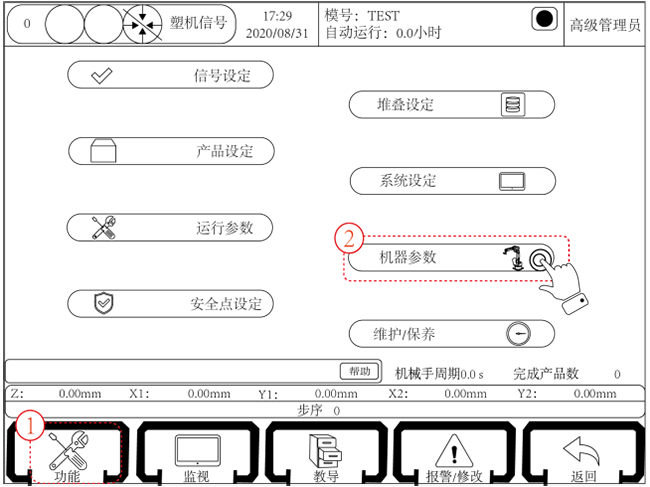
注塑机械手的限位定义是针对机械参数结构的设置,系统为华成工控系列注塑驱控一体控制系统,限位定义主要为气动轴的使用,对伺服轴无用。手控器(示教器)切换停止状态,选择功能——进入机器参数如下图:
限位定义分为单/双臂选择和限位开关信号选择,如下图:
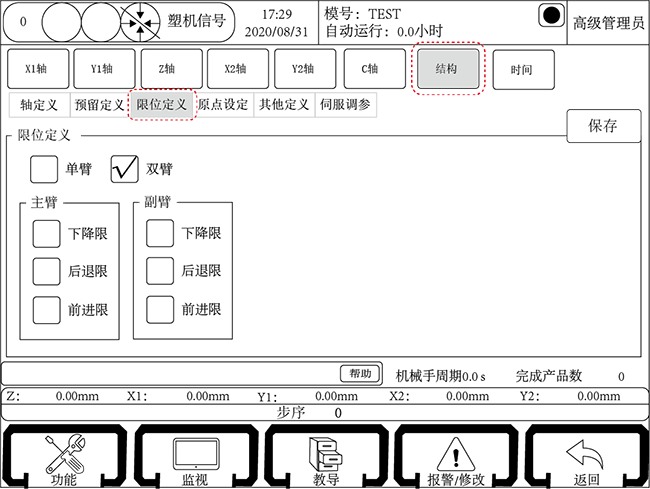
勾选单臂:在手动状态,只能对主臂动作进行教导,且按键“X2+”,“X2-”,“Y2+”,“Y2-”为无效状态。
勾选双臂:在手动状态,主臂和副臂动作均可进行教导,副臂按键为有效状态。
主臂:下降限,后退限,前进限。
副臂:下降限,后退限,前进限。若副臂为气动轴,则限位有效,当相应的气动轴动作时,必须有限位信号,程序才会执行下一步。否则报警。
注意:限位定义只对气动轴有效,对伺服轴无效。

