咨询电话
13924666952
400-158-1606


关节冲压机器人机械手应用系统为华成系列四轴关节机器人冲压系统,需要多工位的机器人联动实现全自动化的冲压流水线生产,设置如下:
首先,拨动运行状态“停止状态”,点击程序下的【功能】选择,在设定页面点击【机械】按钮可进入机器参数页面,切换到子分类【结构】选择【机械手配置】,如下图:

1、CAN类型:可以选择主机,从机,无。
若单台机器,选择无。
若多台联机,则整个系统中只能有一个主机,其他必须选择从机。且每台机器的 CAN ID不能重复(CAN ID必须从1开始,主机必须为1)。
2、CAN ID
若单台机器,选择冲床1。
若多台联机,如有3台联机,则主机需选择机械手1-机械手3。其他2台从机都只需选择机械手1;
设置完成后要把页面上方的单机联机按钮设置为联机。
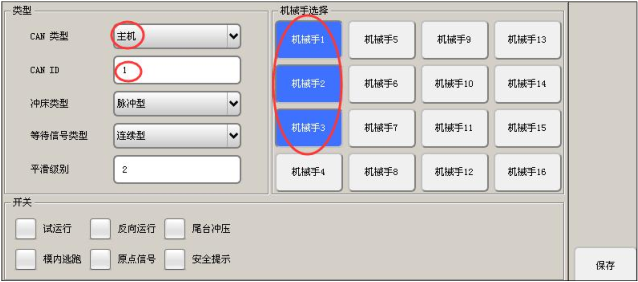
主机
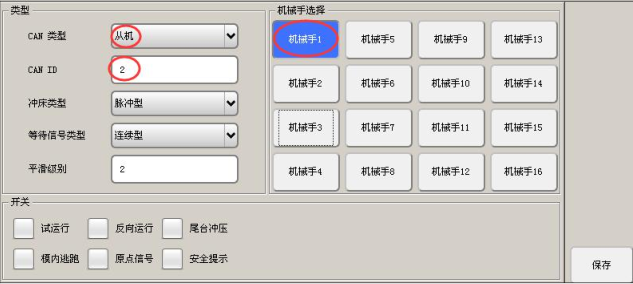
从机1
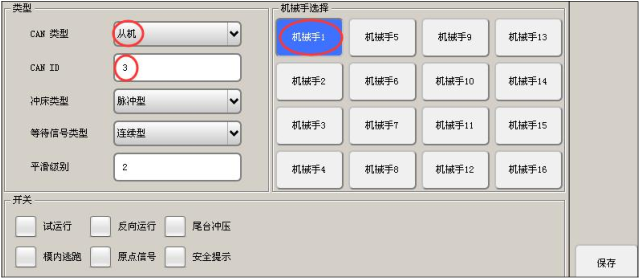
从机2

