咨询电话
13924666952
400-158-1606


EC-RX系列机器人控制系统,系统相关通讯配置设置如下:
点击“通讯配置”进入如下页面,在此页面可以进行通讯配置相关设置:
此页面用于配置通讯参数使用,主要分为三大类型:485通讯、CAN通讯和网络通讯。
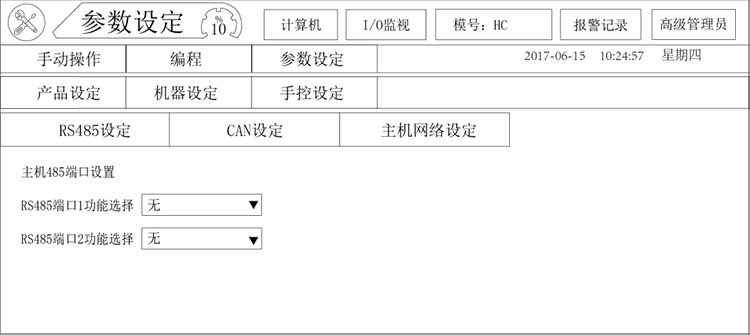
点击“RS485设定”按键,弹出如下页面:
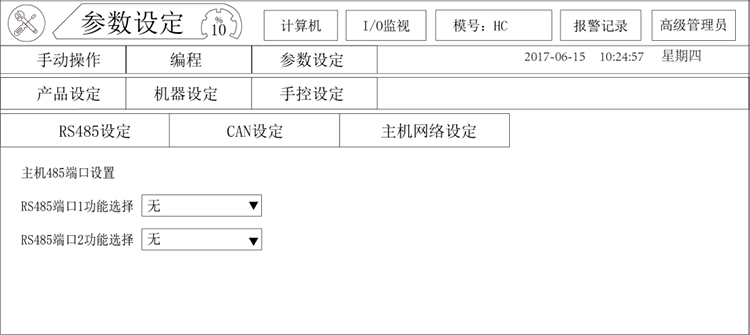
主机包含2个RS485端口,每个端口可以选择如下功能:
RS485编码器:布瑞特RS485编码器,目前可以用于跟随工艺。(不推荐使用)。
RS485模拟量模块:公司配套的模拟量模块板。
MODBUS主站:选择后本控制器作为MODBUS主站。选择后页面变换如下:
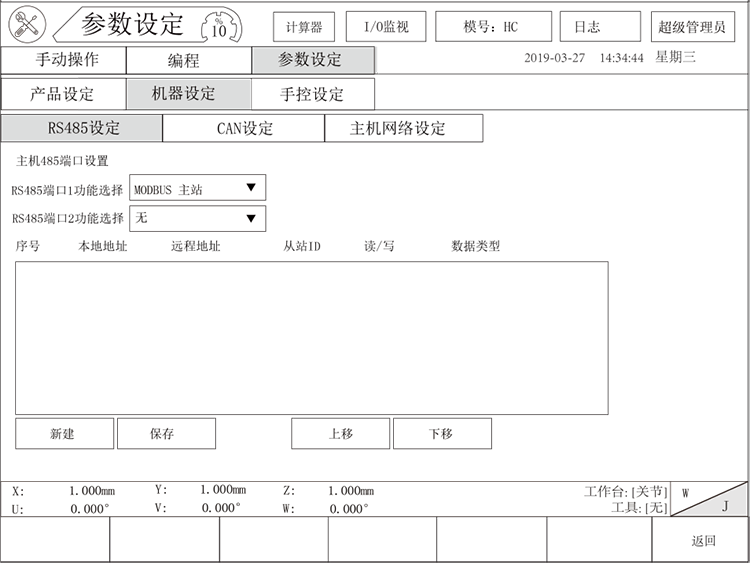
在该页面中可以添加MODBUS通信变量。按如下步骤操作:
1. 点击“新建”按钮:页面变换如下:
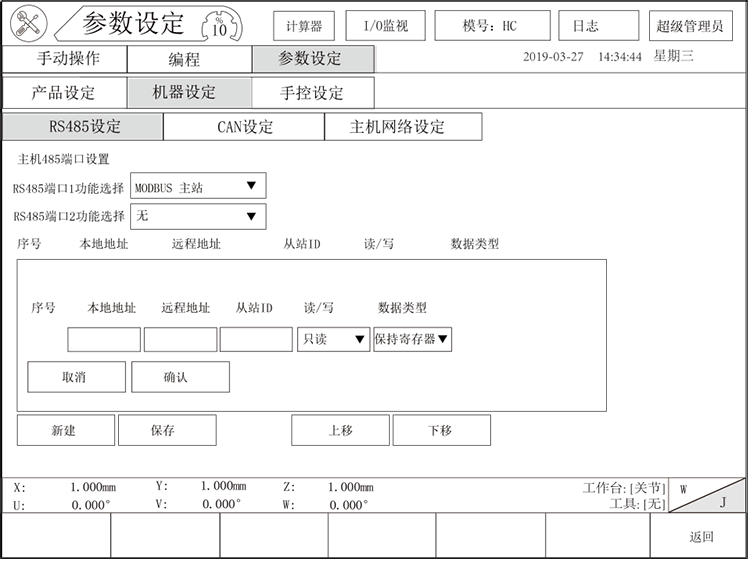
本地地址:控制器开放的800-900直接的地址。
远程地址:MODBUS从站的变量地址。
从站ID:MODBUS从站的地址。
读/写:控指明该规则的操作方式是读“远程地址”还是把“本地地址”的值发送给MODBUS从站。
数据类型:MODBUS协议的功能码。
1. 规则设定完后点击“确认”完成设定。
2. 点击“保存”按键,保存所有的规则。
扩展IO:公司配套的扩展IO板。
MODBUS从站:公选择后本控制器作为MODBUS从站,可以参考“远程通信说明文档”进行MODBUS通信。
焊接寻位:基恩士的激光测量设备。(不建议使用)
点击“CAN设定”按键,弹出如下页面:

ID配置:本控制器的CAN通信ID地址。
波特率:CAN通信时采用的通信速率。
用途:CAN口用作的功能,有如下几种:
编码器:布瑞特单圈绝对值CAN编码器,用户传送带跟随应用。
模拟量模块:不再使用。
扭矩:脉冲系列产品用于读取伺服扭矩。
联机:冲压工艺联机使用,具体参考“冲压工艺说明”。
CAN网络通信:使用后可以在教导指令里面使用CAN指令。
点击“主机网络设定”按键,弹出如下页面:
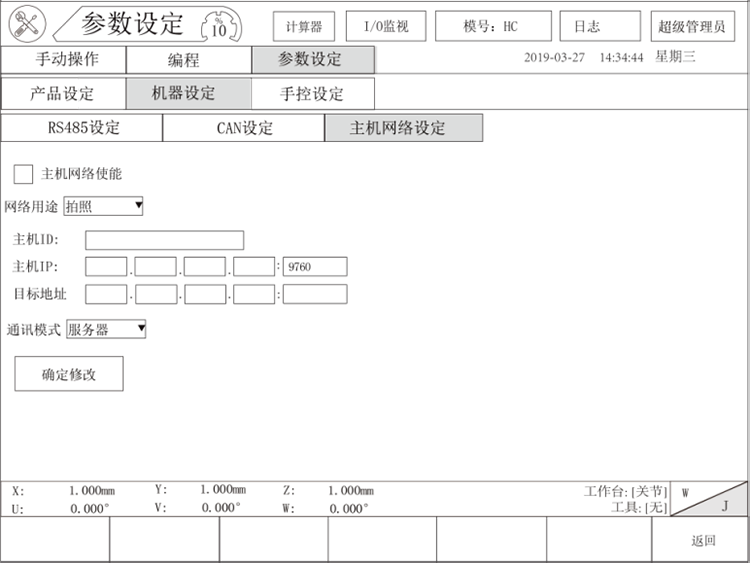
主机网络使能:开放主机的网络接口。
网络用途:有如下两个特殊用途:。
拍照:开启视觉通信拍照功能,其它功能默认都选该选项。
焊接寻位:通过网络口和焊机通信时选择该选项。
主机ID:MODBUS协议使用的主机ID。
主机IP:主机的本机IP地址,需要设置为与通信设备同一网段。
目标地址:与本机IP通信的目标IP地址,“通信模式”为客户端时必须设定。
通信模式:
服务器:本机做为通信的服务器端。
客户端:本机做为通信的客户端。
确定修改:保存网络设定。

