咨询电话
13924666952
400-158-1606


工业机器人控制系统应具有的特点是什么?下面华成工控就来介绍一下!工业机器人控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项。其中有些项目的控制是非常复杂的,这就决定了工业机器人的控制系统应具有以下特点:
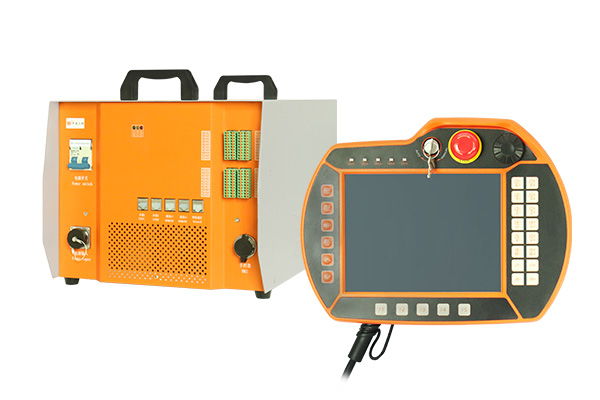
机器人控制系统-六轴通用机械手系统
1、工业机器人控制系统的工业机器人的控制与其机构运动学和动力学有着密不可分的关系,因而要使工业机器人的臂、腕及末端执行器等部位在空间具有准确无误的位姿,就必须在不同的坐标系中描述它们,并且随着基准坐标系的不同而要做适当的坐标变换,同时要经常求解运动学和动力学问题。
2、描述工业机器人状态和运动的数学模型是一个非线性模型,随着工业机器人的运动及环境而改变。又因为工业机器人往往具有多个自由度,所以引起其运动变化的变量不止个,而且各个变量之间般都存在耦合问题。这就使得工业机器人的控制系统不仅是一个非线性系统,而且是一个多变量系统。
3、对工业机器人的任一位姿都可以通过不同的方式和路径达到,因而工业机器人的控制系统还必须解决优化的问题。
另外,工业机器人还有一种特有的控制方式——示教再现控制方式。即当需要工业机器人完成某作业时,可预先移动工业机器人的手臂,来示教该作业顺序、位置以及其他信息,在执行时,依靠工业机器人的动作再现功能,可重复进行该作业。
以上就是关于工业机器人控制系统应具有的特点的介绍了,想了解更多行业资讯,可以关注我们的网站。如果还有什么疑问,或者需要这方面的业务,欢迎致电联系我们!

