咨询电话
13924666952
400-158-1606



支持脉冲型,总线型编码器扩展;一体简约架构,节省安装时间;
支持直线插补,圆弧插补,路径平滑等,具有高性能连续轨迹前瞻控制及卓越的速度曲线规划;
32路标准输入,32路标准输出;
采用高速总线结构,集成主控单元(逻辑+运动控制),整流单元,驱动单元,IO单元。可适配1~4轴,满足不同的应用场景;
单轴功率可覆盖100W~1800W范围;
系统采用多芯片分布式架构方案,高性能ARM处理器,搭配自主优化的实时Linux操作系统;
2.5kHz电流环带宽,最大限度降低增益调整难度,具有陷波滤波器,平滑滤波器,震动抑制等高级功能,保证运动的平稳;
丰富的通讯接口,可灵活配合其它生产辅助设备使用,方便系统的扩展;
搭配高精度绝对值编码器电机,控制精度可达到0.01mm,满足高精度应用的场景。
GC-R4四轴水平SCARA平面关节机器人控制系统是针对桌面型应用的机械手控制系统,总线驱控一体框架,免除焊线、减少维护成本,具有柔性、多维度、多自由度特点,搭配自有视觉模块,结合新一代视觉标定技术提高标定精度,动态抓取技术可显著提升同步带跟随动态抓取效率。广泛适用于3C配装、点胶、焊锡、锁付螺丝、上下料等应用场景。

水平SCARA平面关节机器人控制系统功能概括如下:
(1)轨迹插补
系统支持关节运动,直线插补,圆弧插补,整圆插补等轨迹指令;
支持连续轨迹的插补,关节、直线、圆弧和整圆可以任意组合实现连续轨迹的插补动作。
(2)支持多种通信协议
远程通信协议,modbus/tcp协议,通过远程协议和modbus/tcp协议,外部设备可以方便的对机器人进行控制,获取机器人的状态信息等;视觉协议,系统通过Ethernet(以太网)接口和视觉系统建立通信。可以通过教导视觉指令,IO触发和编码器等距离触发等方式完成拍照动作,视觉系统对图像处理完成后,按照视觉协议格式发送图像坐标数据到机器人,实现机器人的视觉引导定位。
(3)多种通信接口
RS485和CAN接口,可以和外部编码器建立通信,应用于视觉跟随,位置闭环控制等场景;
Ethernet接口,可以和外部设备、视觉系统建立通信。
(4)支持工具,工作台坐标系的定义
工具的标定支持两点法,三点法和多点法;
为了便于用户的教导,支持用户自定义工作台坐标系。
(5)固件升级,数据备份与还原
系统支持通过U盘对系统固件进行升级,方便系统最新功能的扩展;
可以将系统的参数在本机备份,也可将参数导出到U盘,使用备份到U盘的参数可以使用备份还原功能,对相同机型的参数进行快速设置。
(6)支持云监控
支持华成云监控平台,通过云监控平台可以实现对系统的当前运行状态,IO状态,故障信息,产量信息进行远程监控。
(7)支持多种工艺包:视觉跟随、点胶、焊锡、螺丝机等。
产品特点:
1.支持脉冲型,总线型编码器扩展;一体简约架构,节省安装时间;
2.支持直线插补,圆弧插补,路径平滑等,具有高性能连续轨迹前瞻控制及优越的速度曲线规划;
3.32路标准输入,32路标准输出;
4.采用高速总线结构,集成主控单元(逻辑+运动控制),整流单元,驱动单元,IO单元。可适配1~4轴,满足不同的应用场景;
5.单轴功率可覆盖100W~1800W范围;
6.系统采用多芯片分布式架构方案,高性能ARM处理器,搭配自主优化的实时Linux操作系统;
7.2.5kHz电流环带宽,最大限度降低增益调整难度,具有陷波滤波器,平滑滤波器,震动抑制等高级功能,保证运动的平稳;
8.丰富的通讯接口,可灵活配合其它生产辅助设备使用,方便系统的扩展;
9.搭配高精度绝对值编码器电机,控制精度可达到0.01mm,满足高精度应用的场景。
工艺包说明:
视觉跟随工艺包
针对有传送带跟踪的应用,可以使用视觉跟随工艺包,通过视觉系统先对产品进行定位,通过外接编码器试试获取产品在传送带上的位置信息,完成产品跟抓应用。
点胶工艺包
针对点胶行业的应用,通过设置路径上的关键点,轨迹一键生成,也可配合视觉系统完成流水线攻台点胶应用。
焊锡工艺包
针对焊锡行业的应用,通过设置焊点,自动生成整个焊接工艺流程,也可配合视觉系统完成视觉焊接任务。
螺丝机工艺包
针对螺丝锁付行业的应用,可以通过设置螺丝孔位或导入dxf文件,完成螺丝孔位的示教工作,也可配合视觉系统完成视觉打螺丝应用。
整体外观接线示意图:
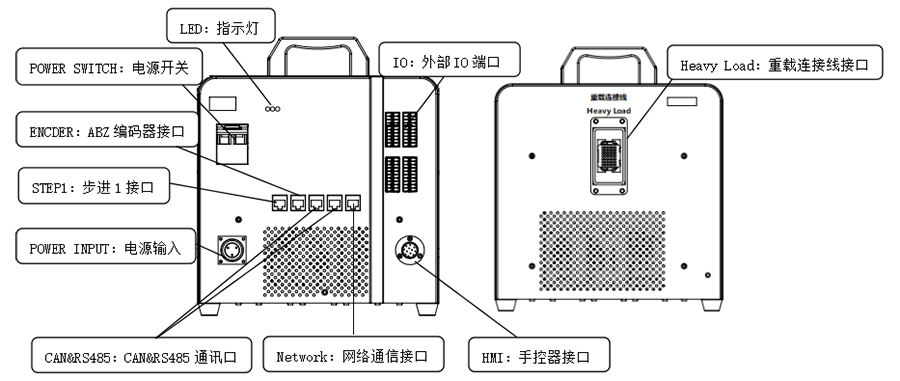
重载头侧定义:


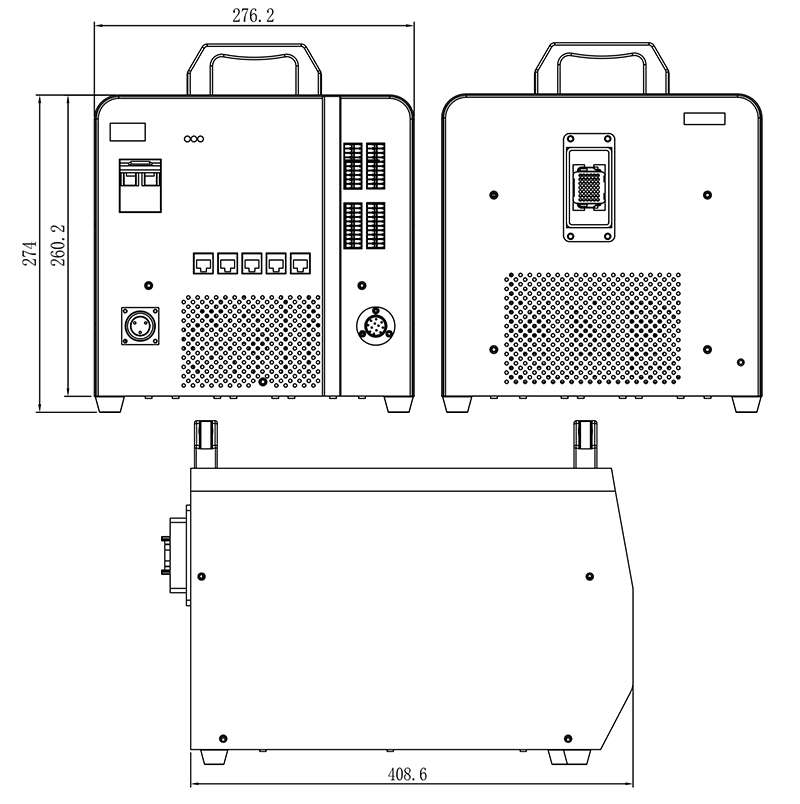
外观整体尺寸图: