咨询电话
13924666952
400-158-1606


HC-S6关节机器人控制系统,远程网络通信设置方法如下。
点击“PortHelper”打开软件,点击“网络调试”进入如下页面:

操作步骤:
①目标 IP 地址:192. 168. 10. 201,点击如图“ping”
如接收区显示,如下图:

则IP地址设置正确,若点击PING,无反应则检查IP地址是否设置正确,以及电脑IP(192.168.10.197)是否设置正确。
②TCP(源端口:80 目的端口:9760)
③点击“打开TCP”图标若“打开TCP”显示“关闭TCP”图标则软件已连接上。若没连上则检查源端口和目的端口是否正确,电脑是否已与目标设备连接好,手控上通信模式是否选择了服务器。具体连接后的页面显示如下:
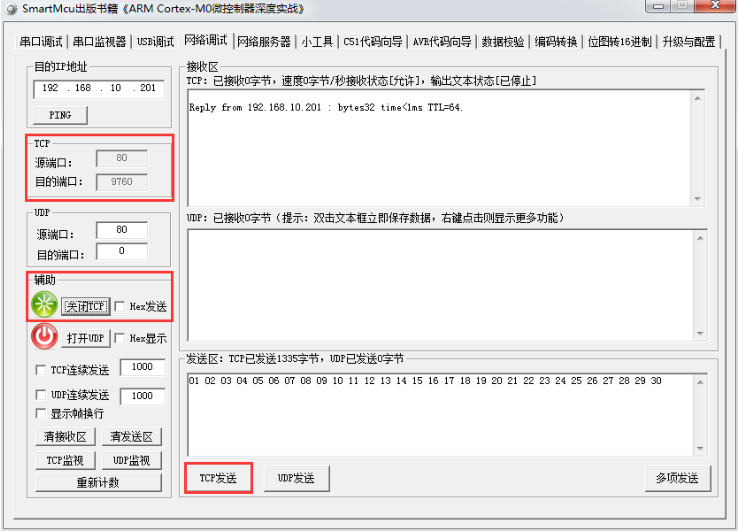
注:连接上以后TCP源端口和目的端口显示灰色,“打开TCP”显示绿色,此时在发送区编辑指令,点击“TCP发送”则手控上会收到相应的命令,并执行命令动作。
教导程序如下:

远程操作流程解析:首先打自动启动程序,远程软件先发送引用地址位置,然后在发送M016通,程序开始自动运行。

