咨询电话
13924666952
400-158-1606


注塑机械手回原点方式,机械手控制系统为华成系列注塑机系统产品。如何回原点方式请往下看:
为了使机械手能正确的自动运行,原点复归动作会将驱动机械手电动轴复归到原点位置,真空和夹具复归到关闭状态。回原点方式分为绝对值式和增量式:进入功能—机器参数--结构--原点设定,绝对值伺服,则为绝对值回原点方式;不勾选绝对值伺服,则为增量式回原点方式;修改回原点方式后,需点击保存,切换三挡开关后才能生效。自动运行之前需确保各轴有准确的原点位置。
(1)绝对值式回原点方式(单板类注塑系统无此种回原点方式)
手动状态下,使用轴动作按键,将机械手移动到目标位置,在停止状态下进入功能—机器参数--结构--原点设定页面,点击“开始原点”,再点击“设为原点”,就将目标位置设为原点位置,此时坐标位置全部显示为0。每次断电时,系统都会自动记忆断电前各轴的位置,重启后各轴位置仍显示为断电前的位置,无需多次回原点。若需要另外的位置作为原点,重复上述步骤。
步骤:停止状态下:功能→机器参数→结构→原点设定→勾选绝对值伺服→保存→开始原点→设为原点
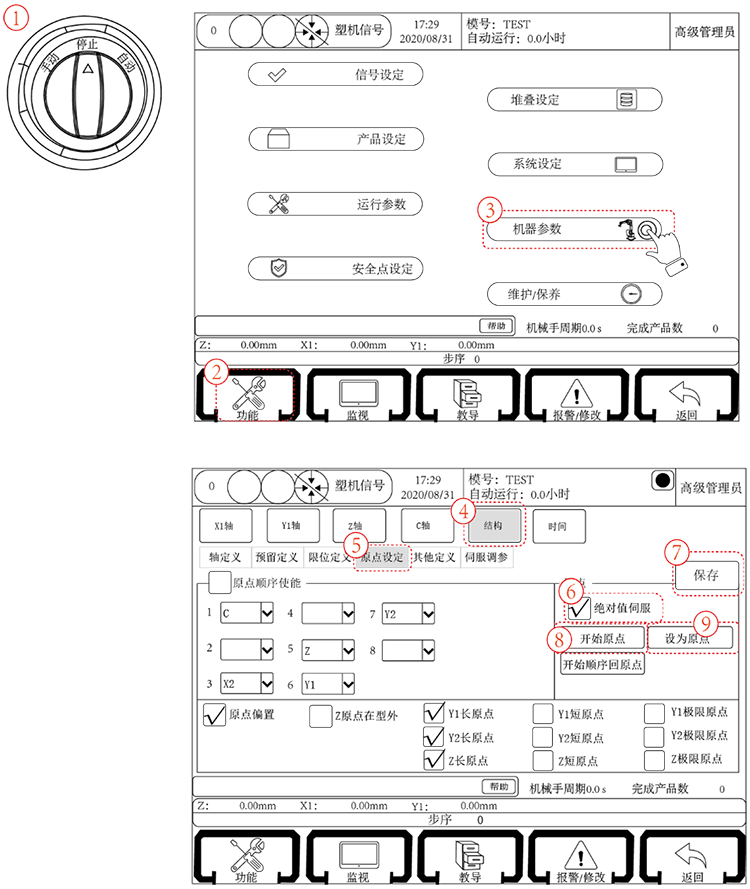
注:绝对值回原点,只能使用功能—机器参数--结构--原点设定的“开始原点”与“设为原点”按钮,而不能使用面板上的“原点”键与“启动”键回。
(2)增量式回原点方式
手控器启动后,确认机器各方面正常后,将状态旋钮打到停止状态,按原点键,再按启动键,或进入机器参数--结构--原点设定页面,点击“开始原点”,再点击手控器上的“启动”按钮,机械手会按照默认回原点顺序Y1、Y2→X1、X2→Z的顺序回到原点位置。若需自定义回原点方式,请进入机器参数--结构--原点设定页面进行设置。
当所有轴、真空和夹具复归到原点位置后,屏幕右上方的![]() 图标变为绿色,才可以进行自动运行和手动电动轴的操作。
图标变为绿色,才可以进行自动运行和手动电动轴的操作。
原点复归时,用户不可以对机械手进行手动、自动操作和参数设定,遇到紧急情况可按停止键停止原点复归或按下急停按钮。
注:增量式回原点,可以使用机器参数--结构--原点设定的“开始原点”与手控器上的“启动”按钮来回,也可以使用手控器上的“原点”键与“启动”键回。

